Project Description:
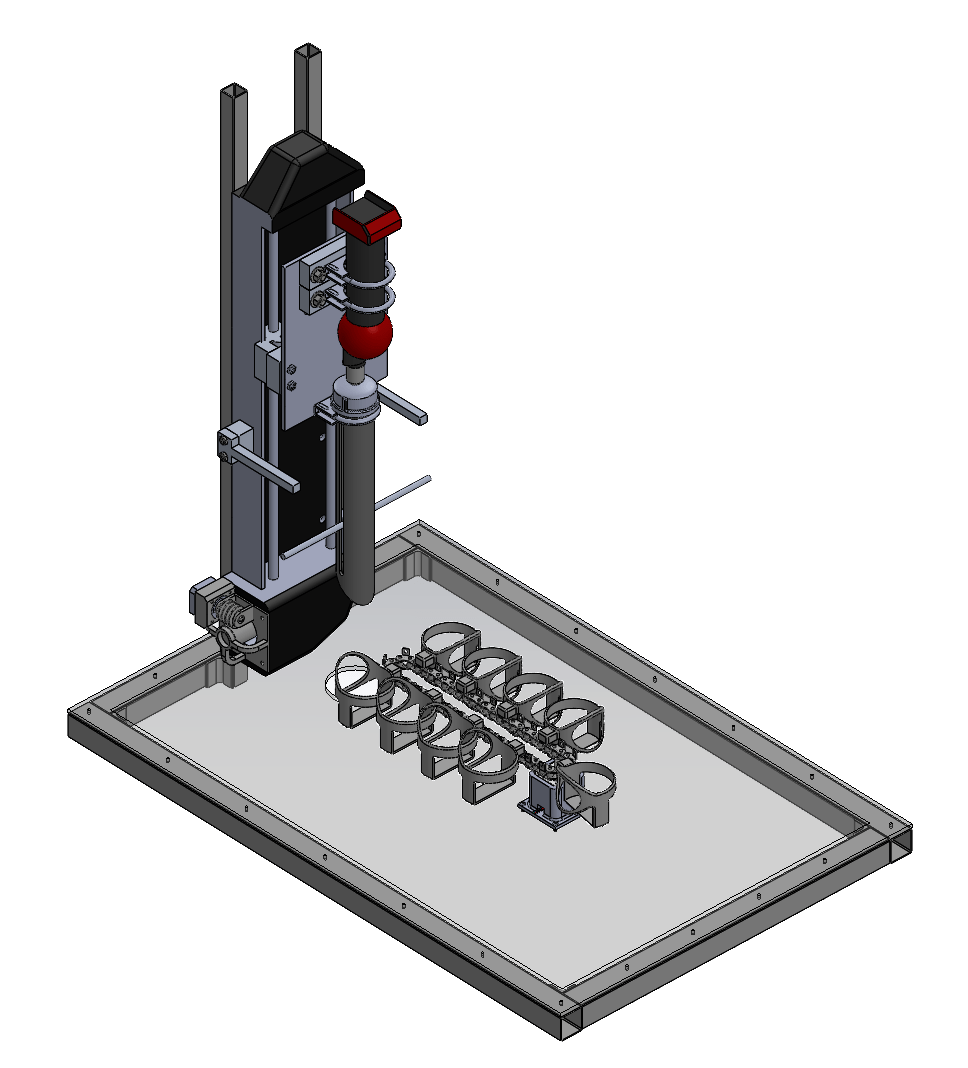
An autonomous soil sampling robot developed for farmland applications. The primary objective of the system is to automate the collection of subsurface soil samples. This objective can be broken down into three primary functions: 1) sample collection, 2) sample storage, and 3) system locomotion. However, the third function of system locomotion was deprioritized in favor of directing more attention to creating a prototype that can clearly demonstrate the first two product functions of sample collection and sample storage.