Project Description:
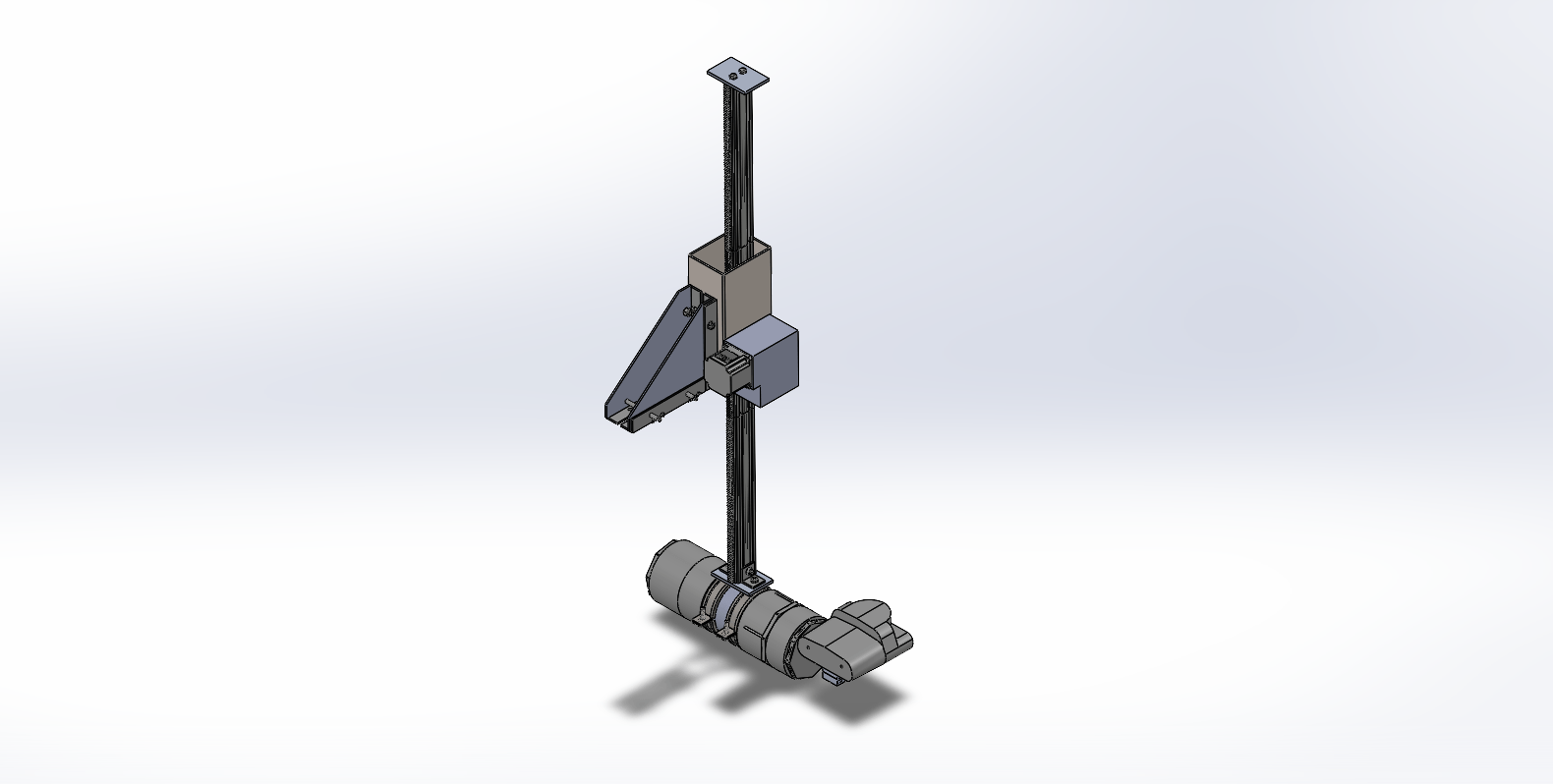
This project aims to develop a mount that connects a sonar and GoPro to an autonomous surface vehicle (ASV) and allows the sonar and GoPro a range of vertical and angular motion to effectively gather data of the oysters on the seafloor. This process contributes to the research to innovate technology in the oyster farming industry. The particular research team involved in this project is S3AM.
Advisor/Instructor:
Dr. Davis McGregorTeam Members:
| Alvin Darby | Mechanical Engineering |
| William Klein | Mechanical Engineering |
| Ryan Mahon | Mechanical Engineering |
| Branden Milam | Mechanical Engineering |
| Joshua Rippeon | Mechanical Engineering |
| Randall Silvestro | Mechanical Engineering |