Project Description:
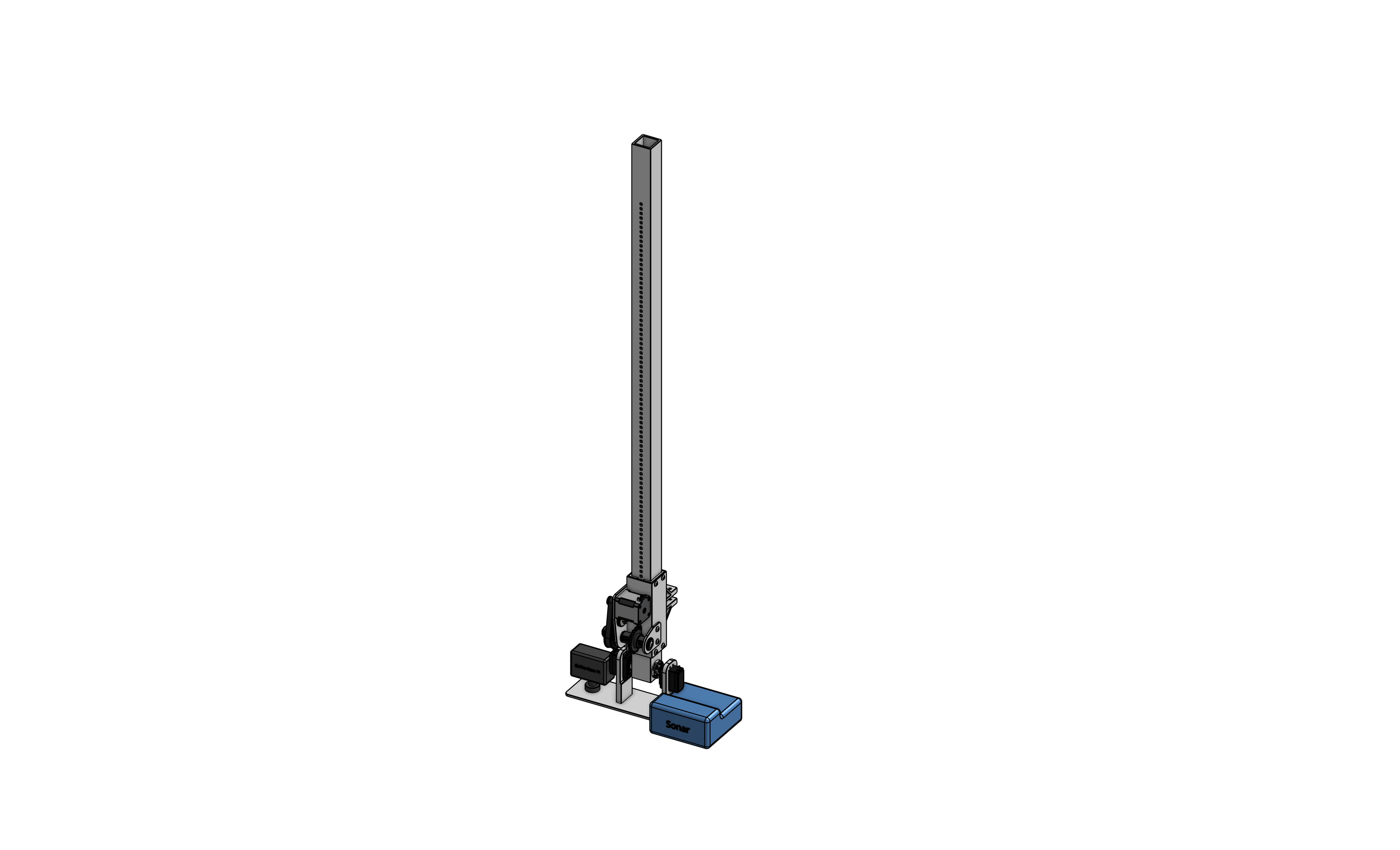
The goal of our team’s project is to design an adjustable sonar mount assembly to be used on a marine Autonomous Surface Vehicle (ASV) for surveying oyster farms, one of the most ecologically sustainable forms of aquaculture. Our sonar mount is customized for Smart Sustainable Shellfish Aquaculture Management (S3AM), a project that is developing robotics technologies to achieve precision shellfish farming, led by Dr. Miao Yu. Our design utilizes a telescoping shaft that can be extended up to three (3) feet, accomplished with a stepper motor connected to a transmission system, and a payload platform that can be rotated between 16-45 degrees by a mirrored pair of servo motors.