Project Description:
The Chesapeake Bay presents a challenging environment for monitoring endangered and invasive species due to low visibility, complex underwater terrain, and limited accessibility. Traditional methods can be time-consuming and resource-intensive. To address this, our team developed an Autonomous Underwater Vehicle (AUV) capable of performing fully autonomous search and localization tasks.
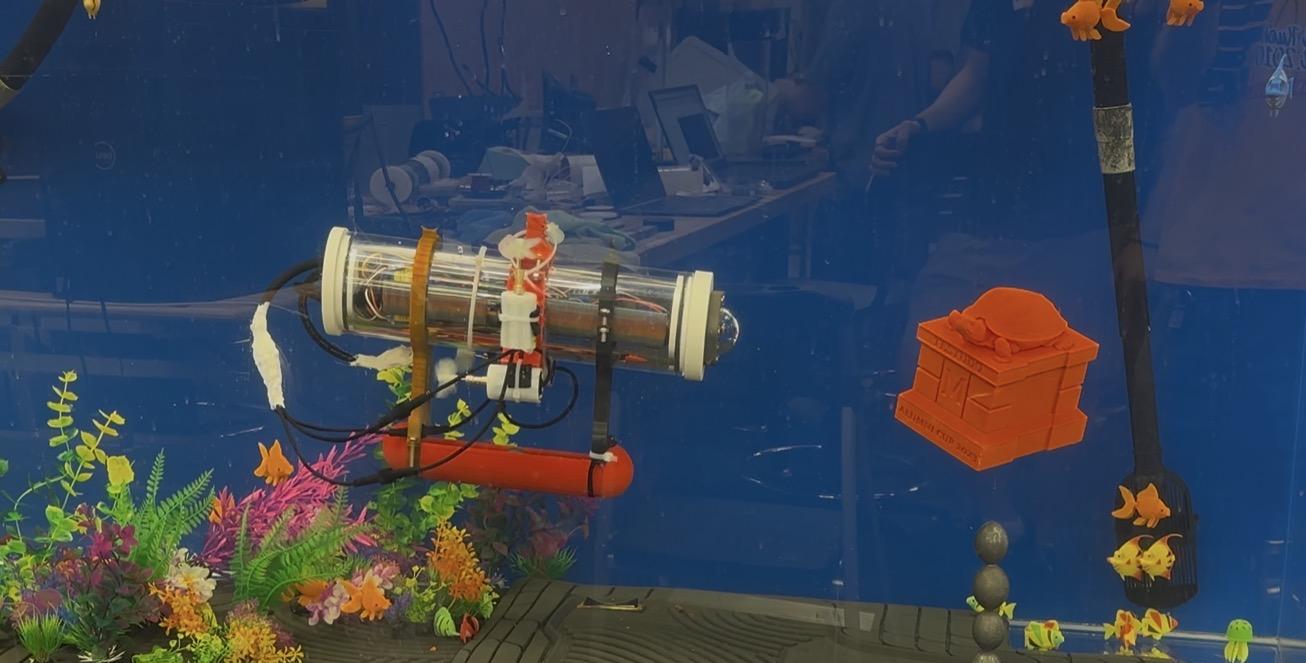
The AUV uses a computer vision system based on a YOLO11 object detection model to identify a submerged Testudo statue. Once detected, a PID controller uses six motors, two on each axis (X, Y, Z), to continuously adjust the vehicle’s motion, keeping the object centered in the camera frame while guiding it forward. Upon reaching the target, the AUV records and reports its coordinates, completing the task autonomously.