Project Description:
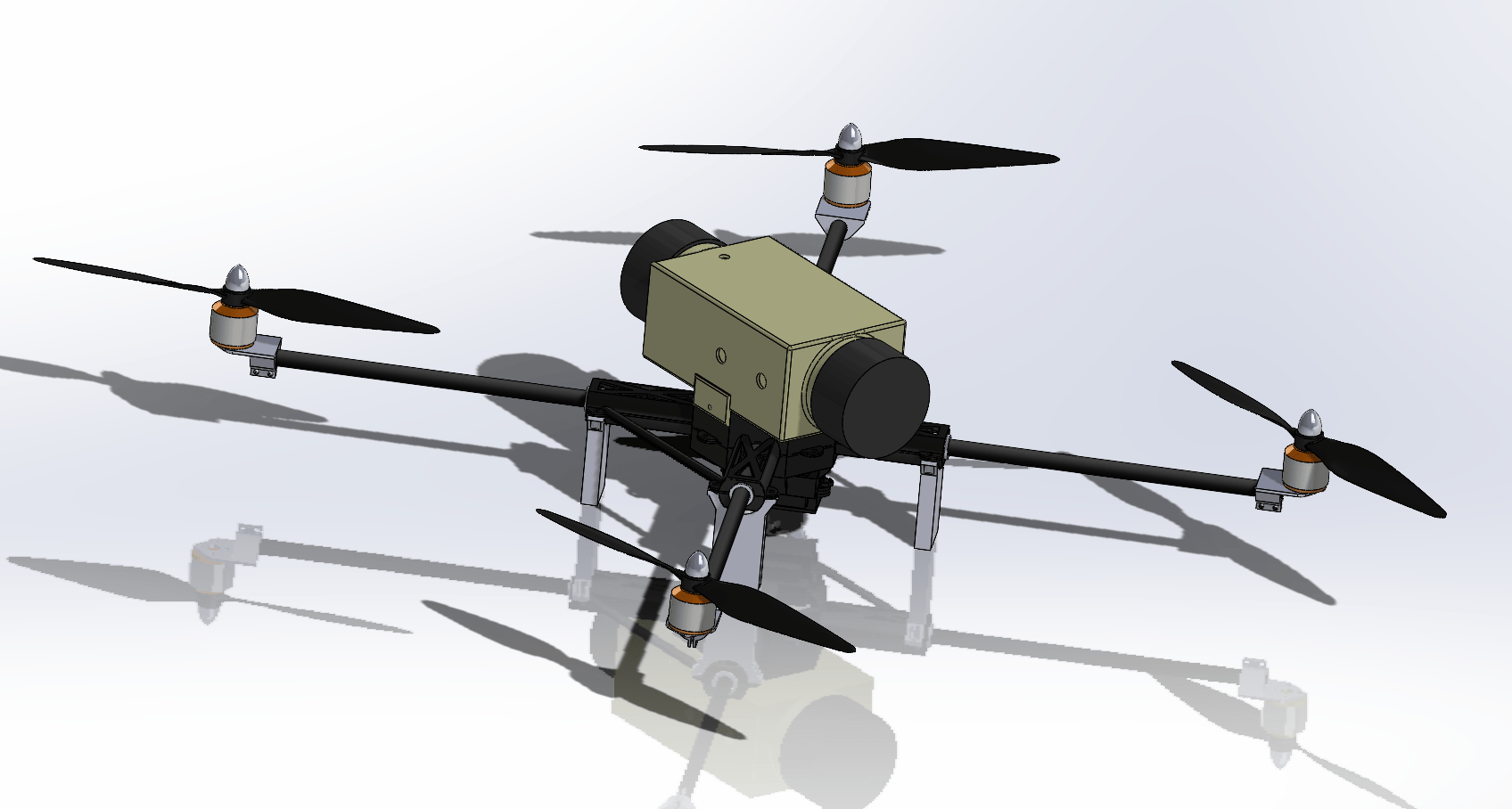
It’s a bird! It’s a plane! No, it’s a duck… or maybe a fish? If you blink, you might mistake this flying, swimming contraption for an everyday animal, but you are really witnessing ME Team 24’s aerial-aquatic quadrotor: The Goose. This design came to life in response to limitations in underwater reconnaissance caused by underwater travel speed. Modern underwater ROV’s travel at speeds below 3 knots while aerial drones can travel at over 5 times that speed. Having the ability to travel in air and sea would allow a drone to survey different underwater locations in an efficient manner. Existing methods for overseeing water ecosystems are not optimal due to limited coverage, slow data collection, and high costs. An aerial aquatic drone can offer a more effective and versatile platform for collecting real-time data, surveilling the environment, and managing resources in aquatic ecosystems. Our design consists of 4 motors attached to rotating arms. In the air, the quadrotor can navigate like a traditional drone--using differential thrust to fly and maneuver around obstacles. In the water, with the use of a servo motor and gear train, the drone can rotate the arms and motors to a precise angle and use thrust vectoring to navigate the seas.