Project Description:
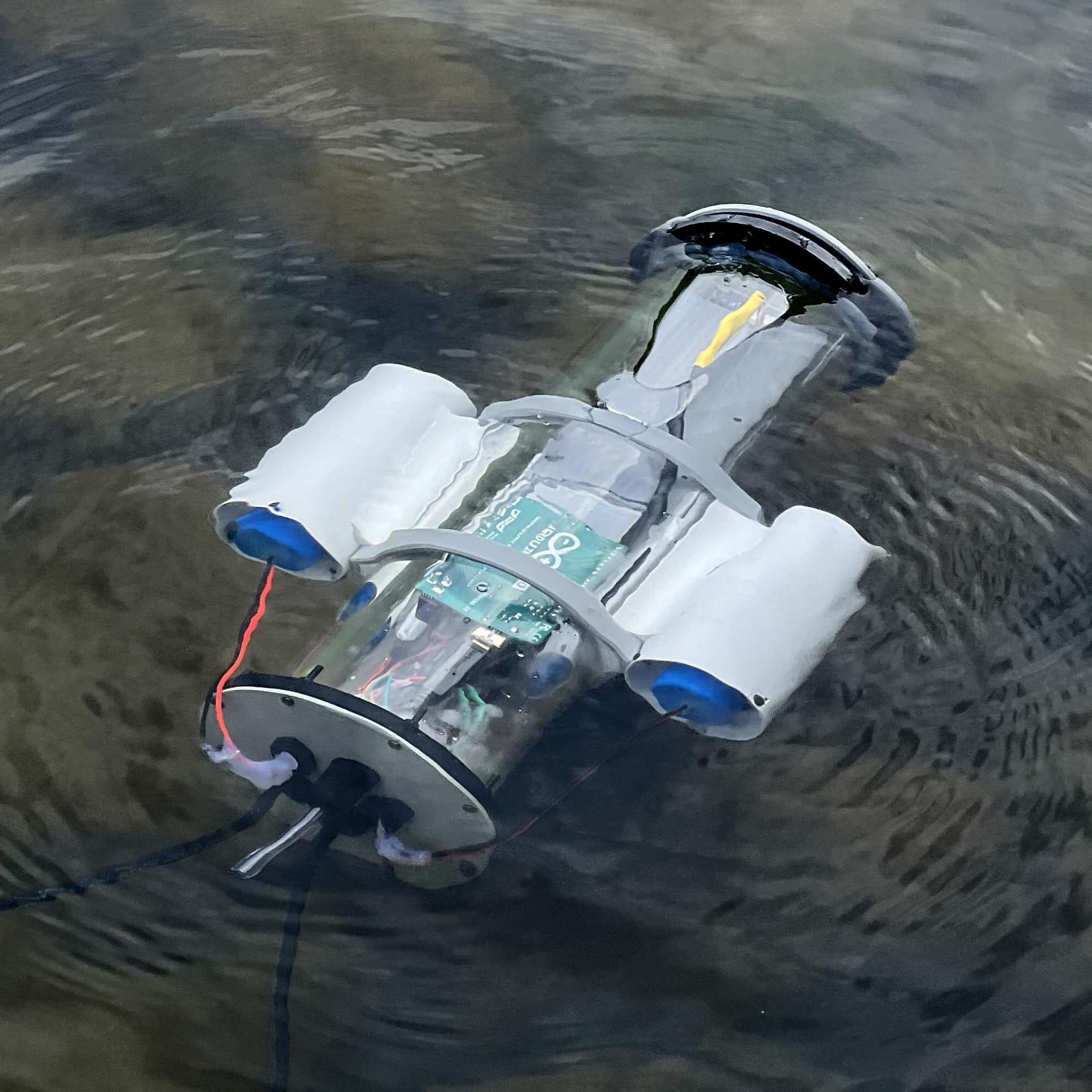
Our project focuses on the design of a compact, remotely operated underwater vehicle for exploring and observing the seabed in shallow, murky environments such as the Chesapeake Bay. Traditional underwater systems often disturb sediment, reducing visibility and limiting their usefulness for research. Our design addresses this challenge by enabling stable, low-impact movement along the seafloor while capturing clear, real-time imagery of benthic habitats and organisms. The vehicle integrates a custom buoyancy control (ballast) system, maneuverable propulsion, and a sealed waterproof housing with onboard cameras and lighting. Designed to be affordable and accessible, this system aims to support scientists, students, and environmental organizations in studying underwater ecosystems more effectively without disrupting the natural environment.