Project Description:
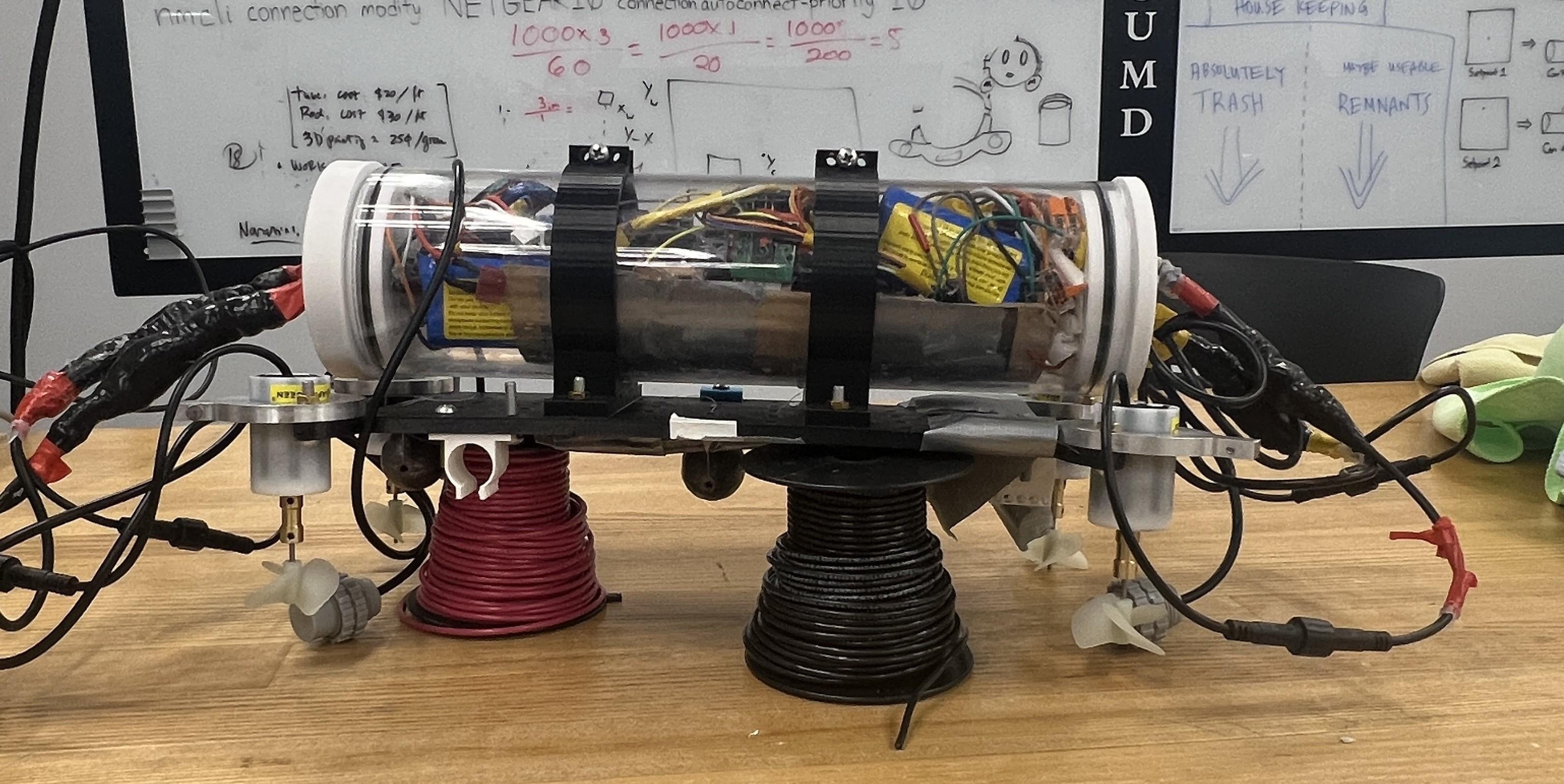
This project focuses on the design and implementation of an autonomous quad-thruster underwater vehicle capable of detecting, navigating to, and reporting the location of a target object in a constrained aquatic environment. The system uses a camera-based vision system using HSV color masking and contour detection to identify the target, while pixel-based error is used to guide motion through a closed-loop control system. Converting image error into motion commands, which are executed through low-level PID controllers to regulate roll, pitch, and vertical thrust for stable navigation. An architecture consisting of a Raspberry Pi for vision and control and an Arduino for motor driving is implemented.