Project Description:
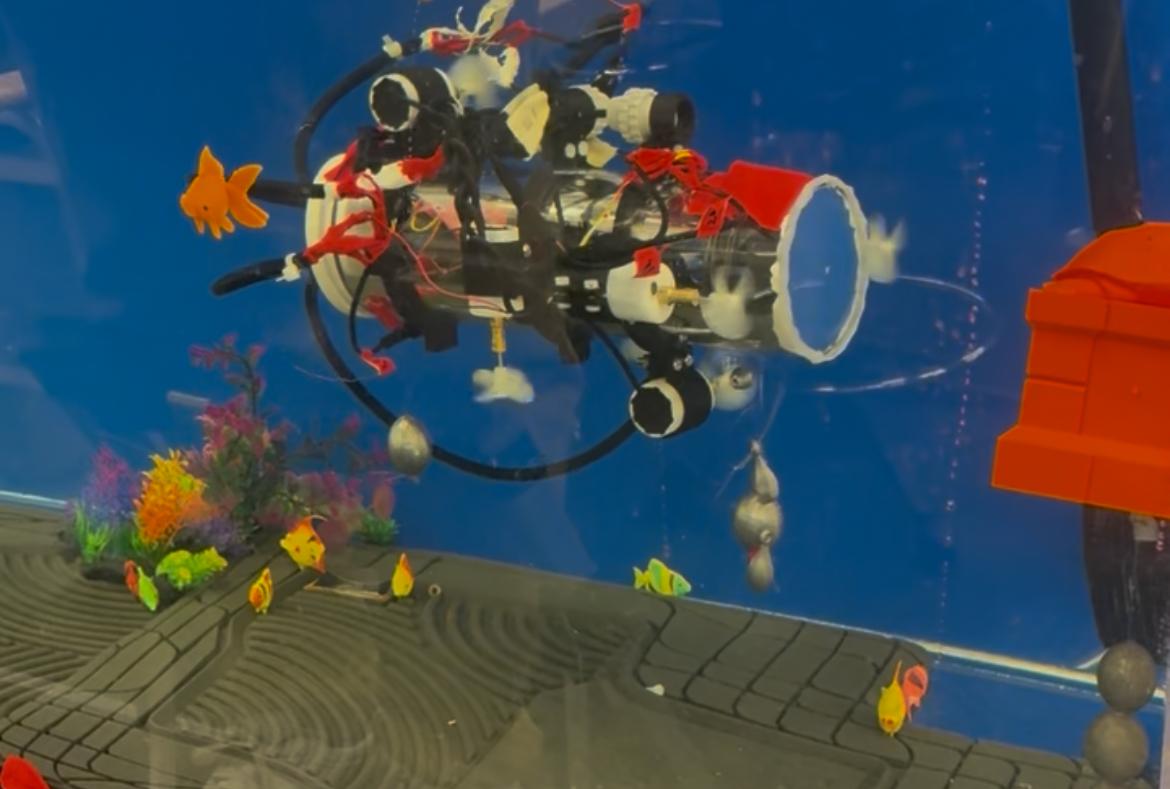
This project presents the design and implementation of a miniature autonomous underwater vehicle (AUV) capable of visually detecting a known target and navigating toward it without human intervention. The system uses a Raspberry Pi camera module and a YOLO-based object detection model deployed on a Raspberry Pi 4B to identify a target object in real time. A custom PID controller drives depth control, enabling the vehicle to match the target's depth and advance towards it autonomously. This work demonstrates a viable approach to vision-based underwater autonomy on resource-constrained embedded hardware.