Project Description:
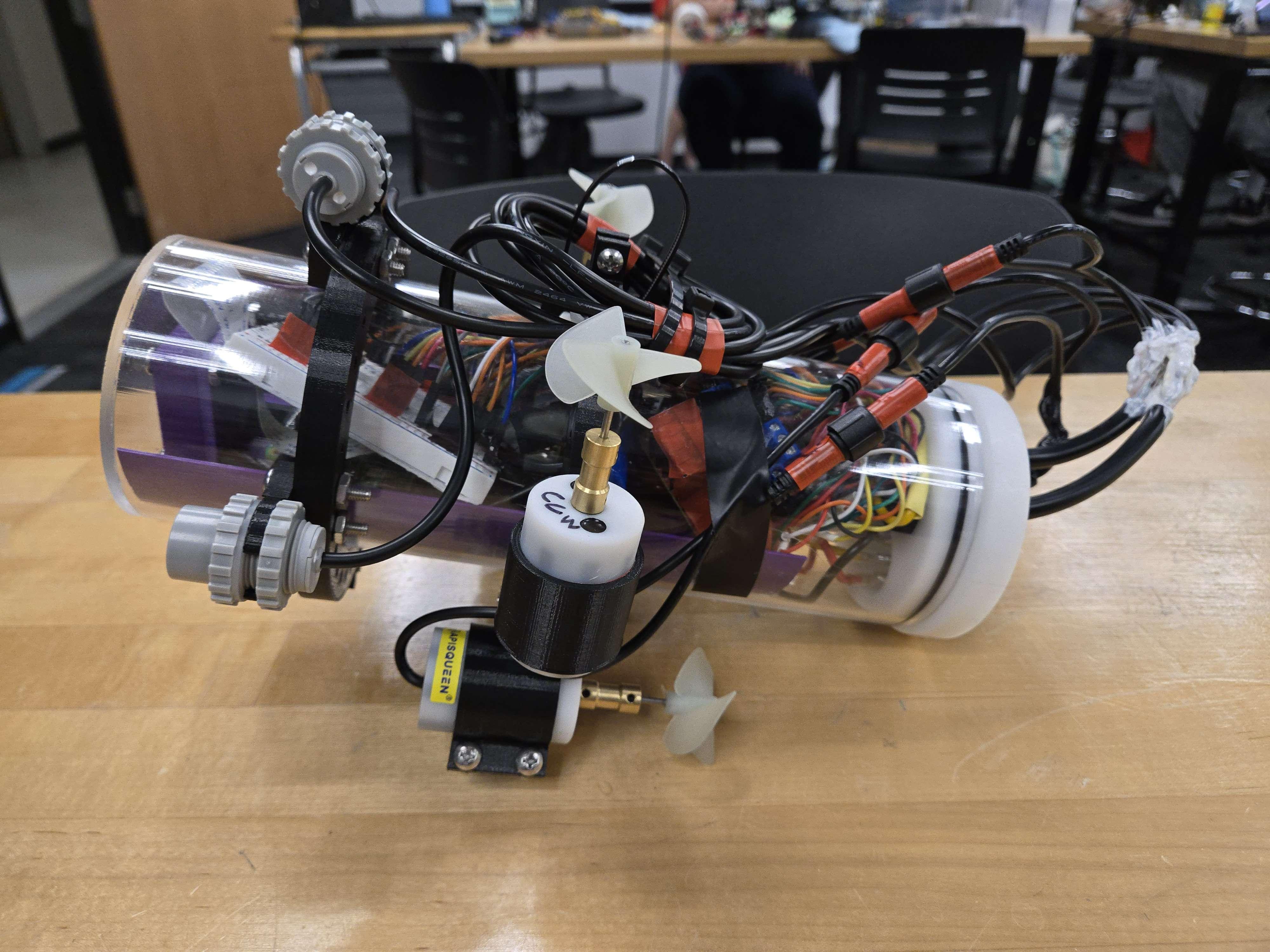
This project focuses on creating and designing a submersible vehicle with the ability to autonomously detect a specific object in an underwater environment and report its coordinates. The submersible utilizes a Raspberry Pi 4 Model B with a Raspberry Pi Camera Module 3 to capture real-time video of the surroundings. Using a YOLO-based object detection model, the target is identified and the vehicle navigates to it using a custom-tuned PID controller to maintain stability. Once the submersible is close enough, it reports the coordinates of the object. This is determined by using an IMU sensor to get the yaw while ultrasonic sensors acquire the distance between the bottom, front, and side of the vehicle and the surrounding environment. This project demonstrates the viability of an autonomous vehicle for applications such as identifying species, observing animal behaviors, mapping out habitats, monitoring ecosystems, and underwater exploration.